คันโยกบานพับสั้น สวิตช์พื้นฐาน

-

ความแม่นยำสูง
-

ชีวิตที่ดียิ่งขึ้น
-

ใช้กันอย่างแพร่หลาย
คำอธิบายผลิตภัณฑ์
สวิตช์แบบคันโยกบานพับให้ระยะการใช้งานที่ยาวขึ้นและความยืดหยุ่นในการใช้งาน การออกแบบแบบคันโยกช่วยให้ใช้งานได้ง่าย และเหมาะอย่างยิ่งสำหรับการใช้งานในพื้นที่จำกัดหรือมุมที่เข้าถึงยาก ซึ่งทำให้การใช้งานโดยตรงทำได้ยาก โดยทั่วไปแล้วจะใช้ในเครื่องใช้ไฟฟ้าในครัวเรือนและระบบควบคุมอุตสาหกรรม
ขนาดและลักษณะการทำงาน
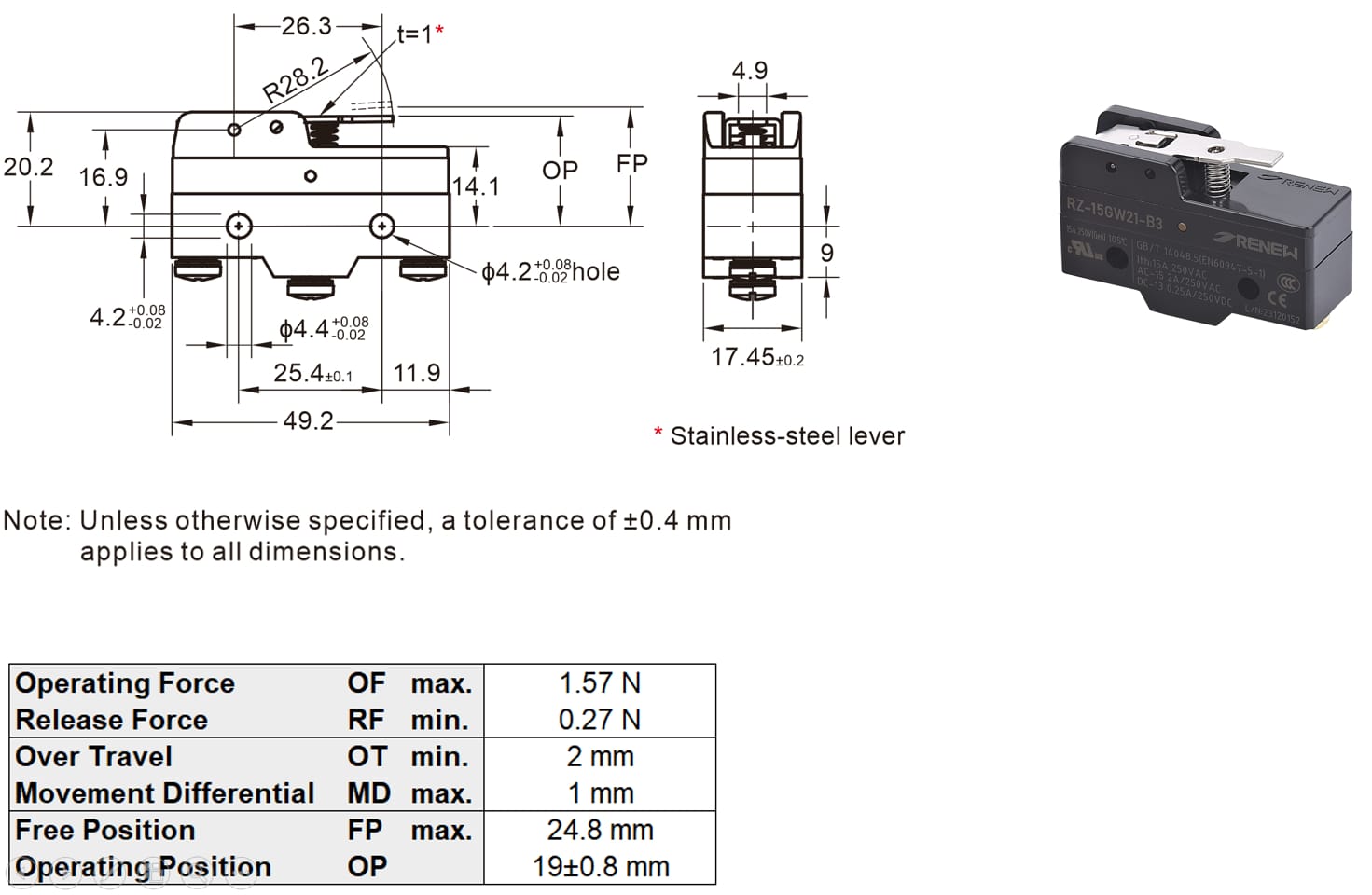
ข้อมูลทางเทคนิคทั่วไป
| การให้คะแนน | 15 แอมป์, 250 โวลต์กระแสสลับ |
| ความต้านทานฉนวน | ความต้านทานขั้นต่ำ 100 เมกะโอห์ม (ที่ 500 โวลต์กระแสตรง) |
| ความต้านทานการสัมผัส | ความต้านทานสูงสุด 15 มิลลิโอห์ม (ค่าเริ่มต้น) |
| ความแข็งแรงของไดอิเล็กทริก | ระหว่างขั้วสัมผัสที่มีขั้วเดียวกัน ช่องว่างสัมผัส G: 1,000 VAC, 50/60 Hz เป็นเวลา 1 นาที ระยะห่างของหน้าสัมผัส H: 600 VAC, 50/60 Hz เป็นเวลา 1 นาที ช่องว่างสัมผัส E: 1,500 VAC, 50/60 Hz เป็นเวลา 1 นาที |
| ระหว่างชิ้นส่วนโลหะที่นำกระแสไฟฟ้ากับกราวด์ และระหว่างขั้วต่อแต่ละขั้วกับชิ้นส่วนโลหะที่ไม่นำกระแสไฟฟ้า แรงดันไฟฟ้า 2,000 โวลต์ AC ความถี่ 50/60 เฮิรตซ์ เป็นเวลา 1 นาที | |
| ความต้านทานต่อการสั่นสะเทือนสำหรับการทำงานผิดปกติ | 10 ถึง 55 เฮิรตซ์, ความกว้างสองเท่า 1.5 มม. (การทำงานผิดปกติ: สูงสุด 1 มิลลิวินาที) |
| อายุการใช้งานเชิงกล | ช่องว่างสัมผัส G, H: อย่างน้อย 10,000,000 ครั้ง ช่องว่างการติดต่อ E: 300,000 การดำเนินงาน |
| อายุการใช้งานทางไฟฟ้า | ช่องว่างสัมผัส G, H: อย่างน้อย 500,000 ครั้ง ช่องว่างการติดต่อ E: อย่างน้อย 100,000 ครั้ง |
| ระดับการป้องกัน | ใช้งานทั่วไป: IP00 กันน้ำหยด: เทียบเท่ามาตรฐาน IP62 (ยกเว้นขั้วต่อ) |
แอปพลิเคชัน
สวิตช์พื้นฐานของ Renew มีบทบาทสำคัญในการรับประกันความปลอดภัย ความแม่นยำ และความน่าเชื่อถือของอุปกรณ์ต่างๆ ในหลากหลายสาขา ต่อไปนี้คือตัวอย่างการใช้งานยอดนิยมหรือที่อาจนำไปใช้ได้

เซ็นเซอร์และอุปกรณ์ตรวจสอบ
มักใช้ในเซ็นเซอร์และอุปกรณ์ตรวจสอบระดับอุตสาหกรรมเพื่อควบคุมความดันและการไหล โดยทำหน้าที่เป็นกลไกแบบกดติดปล่อยปิดภายในอุปกรณ์

เครื่องจักรกลอุตสาหกรรม
ใช้ในเครื่องมือกลเพื่อจำกัดการเคลื่อนที่สูงสุดของชิ้นส่วนอุปกรณ์ และเพื่อตรวจจับตำแหน่งของชิ้นงาน ทำให้มั่นใจได้ถึงการวางตำแหน่งที่แม่นยำและการทำงานที่ปลอดภัยระหว่างการประมวลผล
แขนหุ่นยนต์แบบข้อต่อและอุปกรณ์จับยึด
ติดตั้งในแขนหุ่นยนต์แบบข้อต่อเพื่อใช้ในชุดควบคุม และให้ข้อมูลการสิ้นสุดการเคลื่อนที่และการนำทางแบบตาราง ติดตั้งในส่วนจับยึดของข้อมือแขนหุ่นยนต์เพื่อตรวจจับแรงกดในการจับยึด













