บานพับคันโยกสั้น สวิตช์จำกัดแนวนอน

-

ความยืดหยุ่นในการออกแบบ
-

การดำเนินการที่เชื่อถือได้
-

ชีวิตที่ดียิ่งขึ้น
คำอธิบายผลิตภัณฑ์
ความทนทานที่สูงกว่าและความสามารถในการทนต่อสภาพแวดล้อมที่รุนแรงเป็นคุณสมบัติเด่นของ RL7140 โดยมีอายุการใช้งานเชิงกลสูงสุดถึง 10 ล้านรอบสวิตช์แอคชูเอเตอร์แบบคันโยกบานพับมีช่วงการทำงานที่กว้างกว่าและมีความยืดหยุ่นสูงมาก ช่วยให้สตาร์ทได้ง่าย เหมาะอย่างยิ่งสำหรับงานที่พื้นที่จำกัดหรือมุมที่ยากลำบากทำให้การสตาร์ทโดยตรงทำได้ยาก
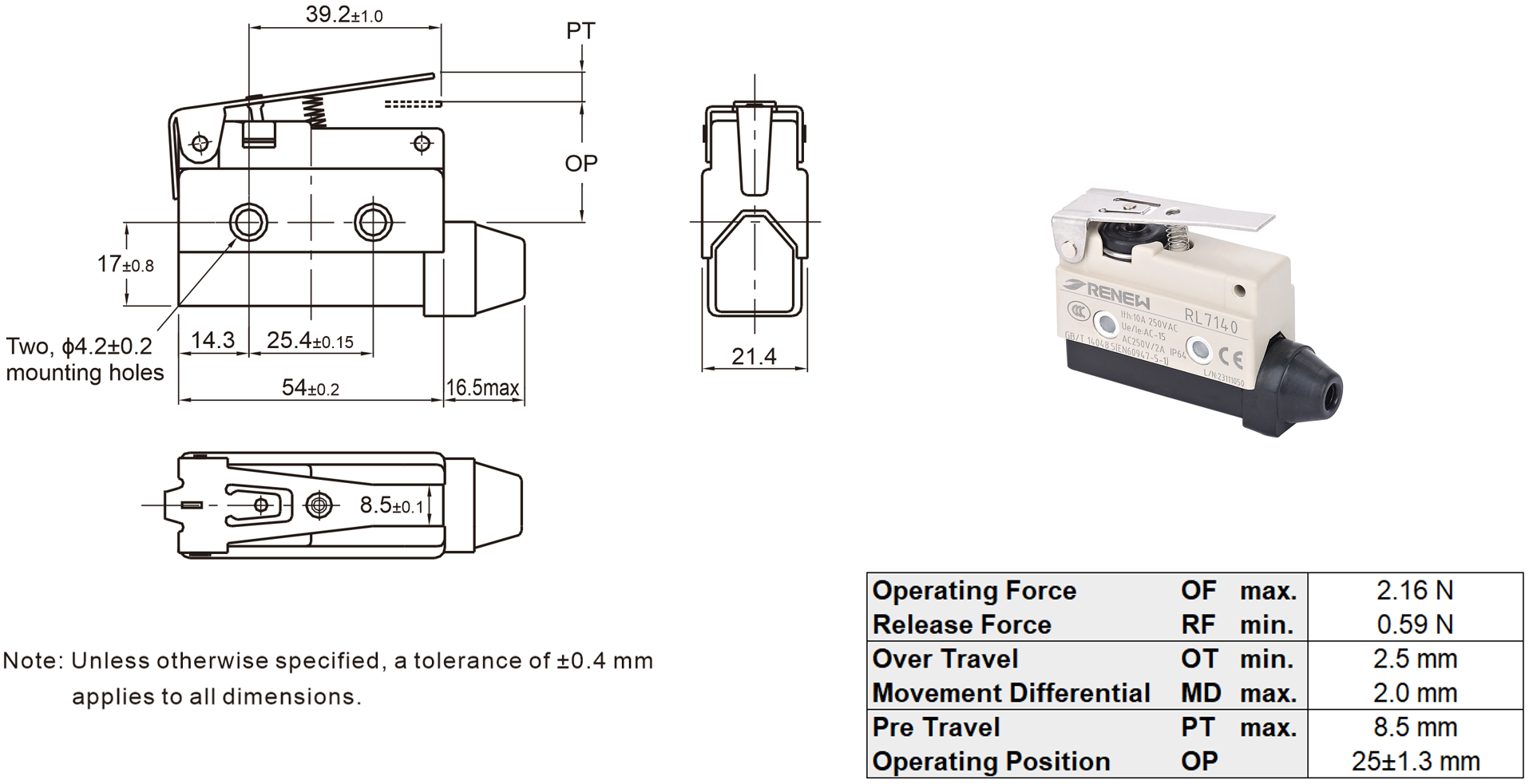
ขนาดและลักษณะการทำงาน
ข้อมูลทางเทคนิคทั่วไป
| พิกัดแอมแปร์ | 10 แอมป์, 250 โวลต์กระแสสลับ |
| ความต้านทานฉนวน | ความต้านทานขั้นต่ำ 100 เมกะโอห์ม (ที่ 500 โวลต์กระแสตรง) |
| ความต้านทานการสัมผัส | ความต้านทานสูงสุด 15 มิลลิโอห์ม (ค่าเริ่มต้นสำหรับสวิตช์ในตัวเมื่อทดสอบเพียงอย่างเดียว) |
| ความแข็งแรงของไดอิเล็กทริก | ระหว่างขั้วสัมผัสที่มีขั้วเดียวกัน 1,000 โวลต์ AC, 50/60 เฮิร์ตซ์ เป็นเวลา 1 นาที |
| ระหว่างชิ้นส่วนโลหะที่นำกระแสไฟฟ้ากับกราวด์ และระหว่างขั้วต่อแต่ละขั้วกับชิ้นส่วนโลหะที่ไม่นำกระแสไฟฟ้า 2,000 โวลต์ AC, 50/60 เฮิร์ตซ์ เป็นเวลา 1 นาที | |
| ความต้านทานต่อการสั่นสะเทือนสำหรับการทำงานผิดปกติ | 10 ถึง 55 เฮิรตซ์, ความกว้างสองเท่า 1.5 มม. (การทำงานผิดปกติ: สูงสุด 1 มิลลิวินาที) |
| อายุการใช้งานเชิงกล | อย่างน้อย 10,000,000 ครั้ง (50 ครั้ง/นาที) |
| อายุการใช้งานทางไฟฟ้า | อย่างน้อย 200,000 ครั้ง (ภายใต้ภาระความต้านทานที่กำหนดไว้ 20 ครั้ง/นาที) |
| ระดับการป้องกัน | ใช้งานทั่วไป: IP64 |
แอปพลิเคชัน
สวิตช์จำกัดระยะแนวนอนของ Renew มีบทบาทสำคัญในการรับประกันความปลอดภัย ความแม่นยำ และความน่าเชื่อถือของอุปกรณ์ต่างๆ ในหลากหลายสาขา ต่อไปนี้คือตัวอย่างการใช้งานยอดนิยมหรือที่อาจนำไปใช้ได้

แขนหุ่นยนต์แบบข้อต่อและอุปกรณ์จับยึด
มีการติดตั้งอุปกรณ์นี้ไว้ในส่วนจับยึดของข้อมือแขนหุ่นยนต์เพื่อตรวจจับแรงกดในการจับยึดและป้องกันการยืดมากเกินไป รวมถึงติดตั้งไว้ในแขนหุ่นยนต์แบบข้อต่อเพื่อใช้ในชุดควบคุม และให้ข้อมูลการสิ้นสุดการเคลื่อนที่และการนำทางแบบตาราง












